
单回路MFA单变量无模型自适应控制系统的结构与传统的单回路控制系统一样简单,该控制系统包括一个单输入单输出(SISO)过程,一个MFA控制器和一个反馈回路。
单回路MFA控制系统
这种控制器的控制目标是产生一个输出u(t),迫使过程变量y(t)在设定值变化,存在扰动和过程动态特性改变的情况下仍然能跟踪设定值r(t)。也就是,MFA控制器以在线的方式不断减小设定值r(t)和过程变量y(t)之间的偏差e(t)。根据以下两点使偏差e(t)最小:(i)MFA控制器的调节控制能力;(ii)不断调整MFA控制器的权重因子,使得控制器有能力处理过程动态特性的改变,扰动和其它不确定因数。
MFA控制器结构
下图显示了一个单输入单输出MFA控制器的基本结构。该控制器在设计上采用了一个多层感知器结构的人工神经网络(ANN),有一个输入层、一个具有N个神经元的隐含层和一个只有一个神经元的输出层。
SISO MFA控制器结构
在这个神经网络中有一组可以根据需要而改变的权重因子(Wij和hi),从而对控制器的行为进行调整。更新权重因子的算法是以缩小设定值与过程变量之间的偏差为目标。由于其效果与控制目标是一致的,因此,采用权重因子能帮助控制器在过程动态特性发生变化的时候减小偏差。此外,基于人工神经网络的MFA控制器保存了一部分历史数据,为了解过程动态特性提供有价值的信息。相比之下,数字式PID控制器只保留当前的和之前的2个采样数据。在这一点上,PID控制器几乎没有任何记忆能力,而MFA拥有一个“聪明”的控制器所必需的记忆能力。
MFA与PID的比较
绝大多数工业过程仍然采用PID(比例-积分-微分)控制器。PID是一种简单的通用型自动控制器,适用于简单系统。但是,对于复杂系统,PID就无能为力了,同时当过程动态特性发生变化的时候,需要频繁地调整PID控制器的参数。下图显示了MFA控制器和PID控制器之间性能的比较,可以看出MFA能自适应过程动态特性变化,取得很好的控制效果。
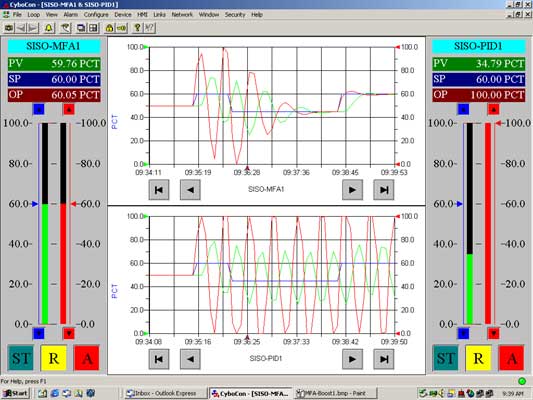
MFA与PID的比较
对于同一个振荡的过程对象,PID控制的系统继续不停地振荡,而MFA控制器能很快地适应过程对象,取得很好的控制效果。如果要控制一个缓慢的过程,MFA将控地更好更快,而PID依旧行动迟缓。
MFA控制系统的要求
作为一个反馈控制系统,MFA对被控对象有以下几点要求:(1)对象可空;(2)开环稳定;(3)正作用或反作用(过程不变方向)。对于不可空的过程对象,则需要改进过程的结构或匹配系统变量。对于开环不稳定的过程对象,则需使它先稳定下来。不过,对于某些开环不稳定的过程,如不能自调节的液位回路,使用MFA时就不需要进行特殊的处理。对于在操作范围内变方向的过程,则需要特殊的MFA控制器。
SISO MFA控制器的配置
SISO MFA控制器只有少数需要设置的参数:(1)采样时间,Ts - 两次采样的间隔时间,以秒为单位。高速版MFA控制器能以1毫秒的采样速率运行;(2)控制器增益,Kc - 建议使用默认参数;(3)时间常数,Tc - 过程时间常数的粗略估计,以秒为单位;(4)作用方向- 正作用或反作用。当过程的输入增加时,输出增加则是正作用,输出减小则为反作用。注意,嵌入于不同平台的MFA控制器的使用方式由控制平台的厂商决定。有时将控制器的作用方向作为参数,这就与过程的作用方向有所不同了。
依据香农定理,采样时间要求不大于时间常数的三分之一,也就是Ts<=1/3Tc,Ts是采样时间,Tc是时间常数。
MFA无需过程辨识,不是一种基于模型的控制器。一旦配置好后,随时能投运MFA控制器,并立刻对过程进行控制。可随时将MFA控制器在自动和手动之间进行切换,无需特殊的无扰动切换步骤。